恖娫嫤挷宆儘儃僢僩YYOU偺奐敪
扟撪揷尋媶幒丂丂惣壀丂椙婰
1.偼偠傔偵
変乆偺尋媶幒偱偼恖娫偲偺嫟懚丄恖偲偺僐儈儏僯働乕僔儑儞偑壜擻側帺棩宆抦擻儘儃僢僩偲偟偰丄恖娫嫤挷宆儘儃僢僩YYOU傪奐敪偟偰偄傞丅杮曬崘偱偼恖娫嫤挷宆儘儃僢僩YYOU偺慡懱峔惉偵晅偄偰曬崘偡傞丅
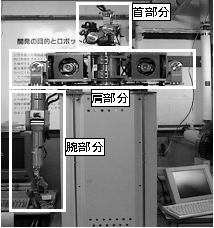
恾侾丂尋媶梡儘儃僢僩丂YYOU
2.儊僇僯僘儉偺峔惉
恾侾偵帵偡傛偆偵恖娫嫤挷宆儘儃僢僩YYOU偼庱丄尐丄榬偺俁偮偺晹暘偐傜側傞丅庱晹偼俁帺桼搙傪帩偪丄擟堄偺偺曽岦傊摢晹傪岦偗傞偙偲偑偱偒傞丅摢晹偵娭偟偰偼丄彨棃奺庬僙儞僒偑搵嵹偝傟傞梊掕偱偁傞丅榬晹媦傃尐晹暘偵偼丄捠忢偺恖娫宆儘儃僢僩偲摨條偵俁偮偺娭愡晹暘偵奺乆俀帺桼搙偱俇帺桼搙偲丄偝傜偵懱偺拞怱幉偵慁夞婡峔傪帩偮娭愡傪嵍塃奺乆侾偮傕偪丄崌寁俈帺桼搙傪傕偮丅偙傟偵傛偭偰巜愭偼擟堄偺巔惃傪偲傞偙偲偑偱偒傞丅偙偙偱丄尐晹偼慁夞塣摦傪偡傞偑丄偦偺夞揮幉偼捠忢偺恖娫宆儘儃僢僩偲偼堎側傝丄儘儃僢僩偺拞怱幉忋偵偁傞丅偙偺傛偆側峔憿傪偲傞偙偲偱丄崢偺慁夞塣摦偲摍壙側栶妱傪壥偨偡偙偲偑偱偒傞丅偝傜偵憃榬嫤挷摦嶌偩偗偱側偔丄奺乆偑撈棫偟偨僄乕僕僃儞僩偲偟偰摦嶌偡傞応崌偱傕壜摦斖埻偑戝偒偔庢傟傞棙揰偑偁傞丅
3.惂屼僔僗僥儉偺峔惉
寁嶼婡偵偼儘儃僢僩梡僀儞僞乕僼僃僀僗儃乕僪丂乮RIF乕侽侾乯偑搵嵹偝傟偰偍傝丄儌乕僞僪儔僀僶傊偺巜椷擖椡傗丄僄儞僐乕僟偐傜偺埵抲忣曬摍偺怣崋傪張棟傪偟偰偄傞丅僄儞僐乕僟偐傜偺忣曬偼丄RIF儃乕僪忋偵搵嵹偟偰偄傞UPP乮儐僯僶乕僒儖僷儖僗僾儘僙僢僒乯偱張棟偝傟丄埵抲忣曬傪偁傜傢偡丅恾俀偵僔僗僥儉偺峔惉恾傪帵偡丅
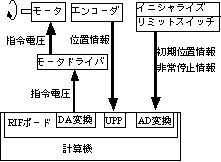
恾俀丂惂屼僔僗僥儉偺峔惉
係.僜僼僩僂僃傾偺峔惉
儌乕僞傗儌乕僞僪儔僀僶丄僄儞僐乕僟偺僞僀僾傗惂屼曽朄側偳偼丄堦戜偺儘儃僢僩偱傕條乆偱偁傞丅廬偭偰丄儌乕僞惂屼傪峴偆応崌丄奺娭愡偛偲偵屄暿偺惂屼梡娭悢傪梡堄偟偰偄偨偺偱偼岠棪偑埆偄丅偦偙偱丄儐乕僓偵偲偭偰偦傟傜偺偙偲傪堄幆偣偢偵僾儘僌儔儈儞僌偱偒傞娐嫬丄偡側傢偪僜僼僩僂僃傾僪儔僀僶傪梡堄偡傞丅偙偙偱偼丄僜僼僩僂僃傾僪儔僀僶傪恾俁偵偟傔偡傛偆側奒憌揑側峔憿偱嶌惉偡傞丅椺偊偽丄恾拞偵偁傞嵟傕婎杮揑側儗儀儖偺娭悢偱偁傞Write_DA偼儌乕僞傊偺巜椷揹埑傪梌偊丄Read_UPP偼僄儞僐乕僟忣曬傪撉傒崬傓丅偦偺忋埵偺憌偱Write_DA傗Read_UPP側偳傪巊偆偙偲偵傛偭偰丄懍搙惂屼丄埵抲惂屼丄僩儖僋惂屼側偳偺僜僼僩僒乕儃偑峔抸偝傟傞丅
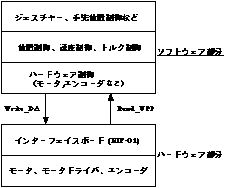
恾俁丂僜僼僩僂僃傾偺峔惉
俆.偍傢傝偵
杮曬崘偱偼丄恖娫嫤挷宆儘儃僢僩YYOU偺慡懱奣梫丄摿偵丄惂屼僔僗僥儉偺婎杮峔惉偵偮偄偰曬崘偟偨丅